激光雷達(Lidar)和毫米波雷達(Millimeter-wave Radar)是自動駕駛汽車中常用的兩種感知技術,。
下面是對這兩種技術的詳細解釋和比較:
激光雷達(Lidar):
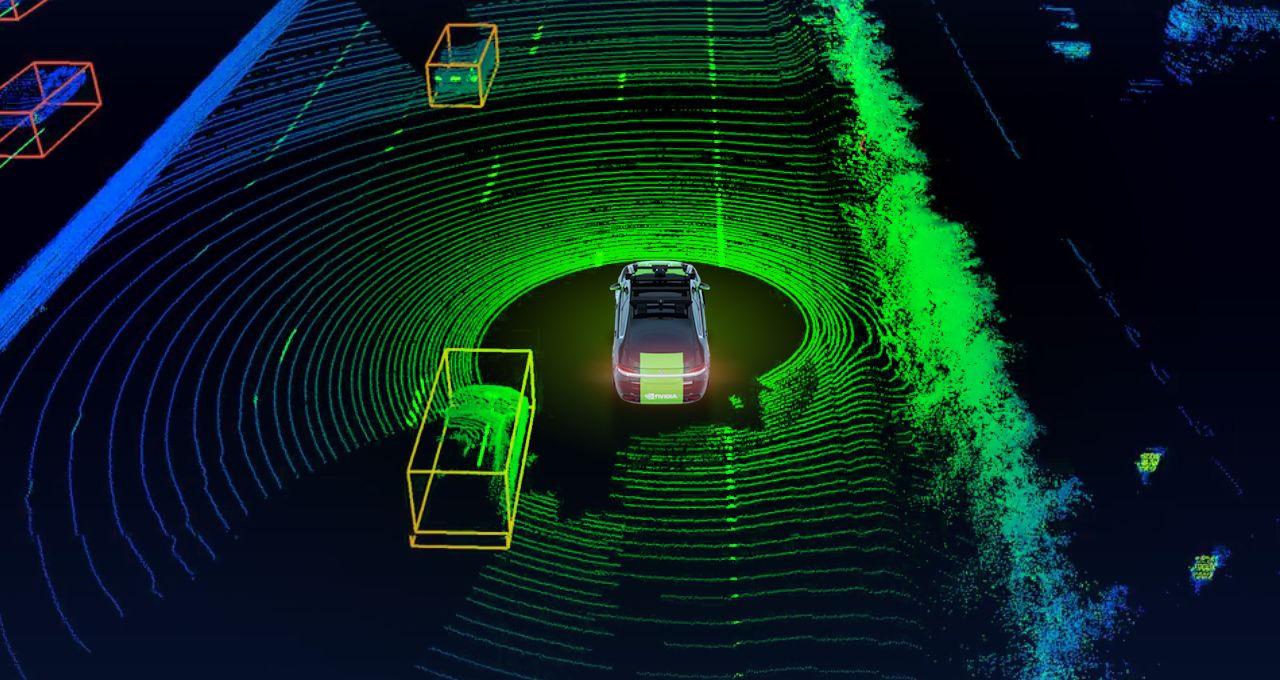
工作原理:激光雷達通過向周圍環(huán)境發(fā)射激光脈沖,,并接收反射回來的激光信號,,來測量物體的距離,、形狀和位置,。通過測量激光脈沖往返的時間差,,可以計算出物體的距離。激光雷達還可以通過掃描周圍環(huán)境,,構建周圍物體的三維點云地圖,,實現對環(huán)境的高精度感知。
優(yōu)點:
高分辨率:激光雷達可以實現厘米級別的距離測量和高精度的三維重建,。
高精度:激光雷達可以精確測量物體的位置和形狀,。
光照條件適應性:激光雷達可以在光照條件較差的環(huán)境中正常工作,包括夜晚,、陰天和隧道等場景,。
缺點:
負面天氣影響:激光雷達易受惡劣天氣條件(如霧、雨和雪)影響,,導致性能下降,。
成本較高:激光雷達的硬件成本相對較高,尤其是高精度的激光雷達,。
距離限制:激光雷達的有效探測距離一般在幾十米到幾百米之間,,對于更遠距離的物體感知能力有限。
毫米波雷達(Millimeter-wave Radar):
工作原理:毫米波雷達通過發(fā)射毫米波(頻率在30-300 GHz之間)并接收反射回來的信號,,來探測周圍物體的位置和速度,。毫米波雷達可以利用多普勒效應來測量物體的速度,通過測量信號往返的時間差來計算物體的距離,。
優(yōu)點:
距離和速度測量:毫米波雷達可以測量物體的距離和速度,,適用于目標跟蹤和碰撞預警等場景。
負面天氣適應性:毫米波雷達可以在惡劣天氣條件下(如雨,、雪和霧)正常工作,。
成本較低:毫米波雷達的硬件成本相對較低,易于大規(guī)模部署,。
缺點:
分辨率較低:毫米波雷達的分辨率相對較低,,對物體形狀和細節(jié)的感知能力有限,。
精度較低:毫米波雷達的距離和速度測量精度相對較低。
多徑干擾:毫米波雷達易受多徑效應影響,,導致性能下降,。
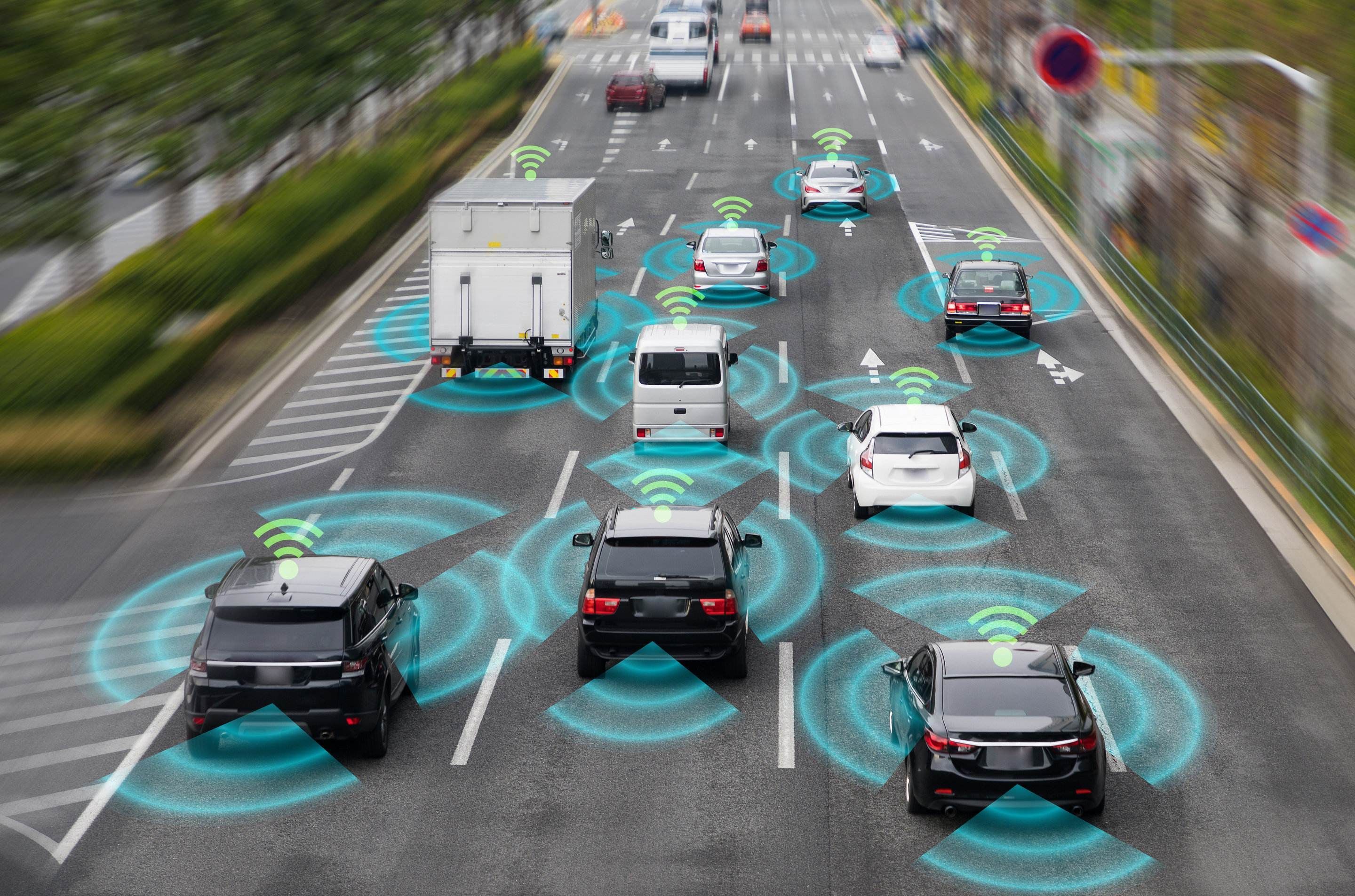
在實際應用中,自動駕駛汽車通常會采用激光雷達和毫米波雷達的組合,,以實現更全面,、更準確的環(huán)境感知。
除了激光雷達和毫米波雷達,,自動駕駛汽車還使用哪些傳感器,?
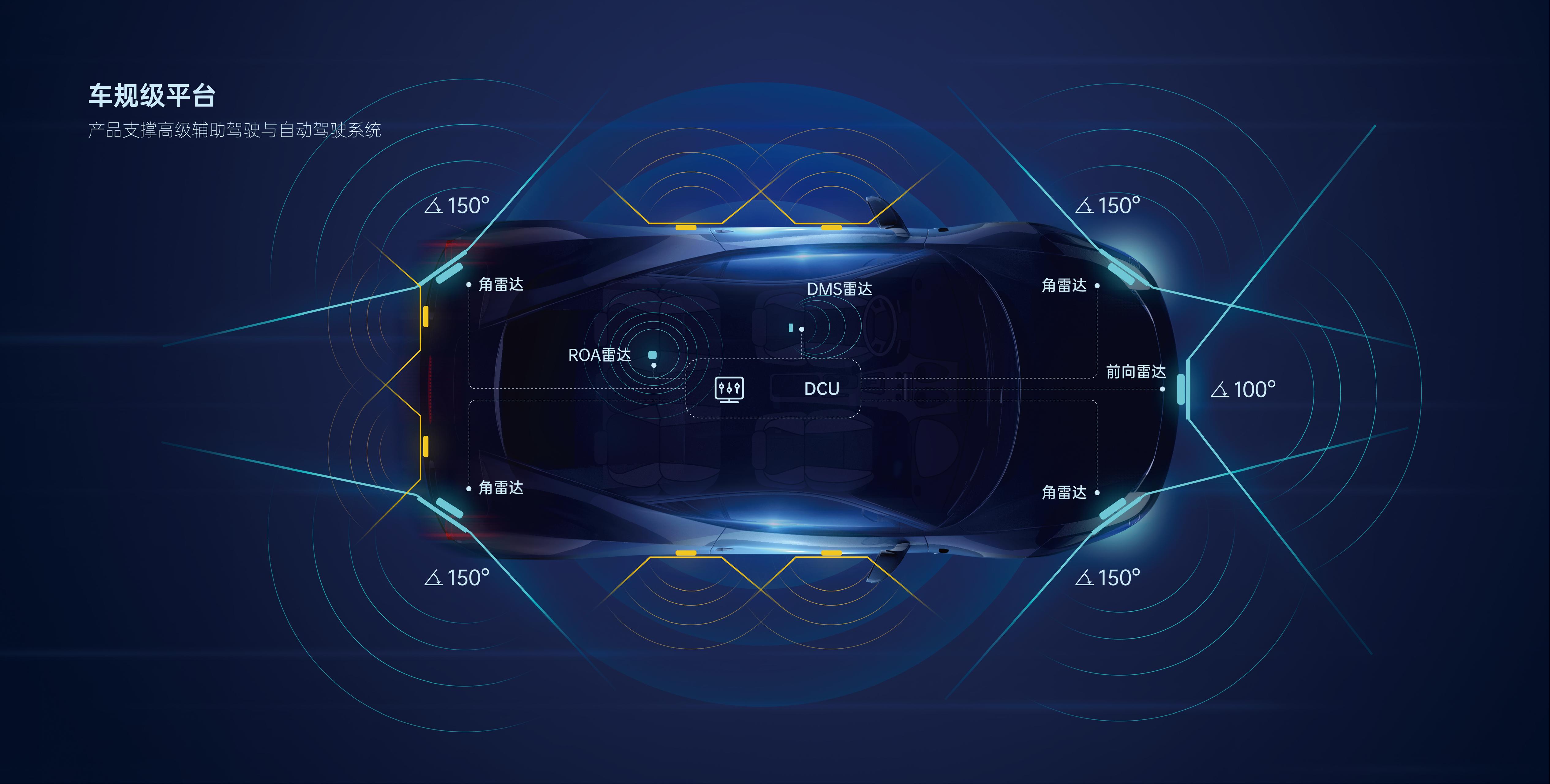
除了激光雷達和毫米波雷達,自動駕駛汽車還使用多種其他傳感器來實現全面的環(huán)境感知和車輛控制,。以下是一些常見的傳感器:
超聲波傳感器:超聲波傳感器通過發(fā)射超聲波并接收反射回來的信號來測量物體的距離,。它們通常用于短距離的物體檢測,例如泊車輔助和避免碰撞,。超聲波傳感器的優(yōu)點是成本低,、易于使用,但其缺點是測量距離較短且受環(huán)境噪聲影響較大,。
高清攝像頭:高清攝像頭可以捕捉周圍環(huán)境的圖像,,用于物體檢測、道路標識識別,、行人檢測等功能,。攝像頭可以提供豐富的視覺信息,但其依賴于光照條件,,并可能受到天氣和視線阻擋的影響,。
全球定位系統(tǒng)(GPS):GPS用于提供車輛的地理位置信息。雖然GPS的精度可能受到建筑物和樹木等遮擋物的影響,,但它仍然可以為自動駕駛汽車提供基本的定位信息,。
慣性測量單元(IMU):IMU包括加速度計和陀螺儀,用于測量車輛的加速度,、速度,、角度和角速度等信息。IMU可以輔助其他傳感器進行車輛控制和定位,。
車輪速度傳感器:車輪速度傳感器用于測量車輪的轉速,,以計算車輛的速度和行駛距離。這些信息對于車輛控制和定位至關重要,。
磁力計:磁力計用于測量地球磁場的方向和強度,,輔助GPS進行車輛的定位和導航。
氣壓計:氣壓計用于測量大氣壓強,可以輔助GPS和IMU進行高度和速度的測量,。
紅外傳感器:紅外傳感器可以用于檢測周圍環(huán)境中的物體和溫度,,適用于夜間和低光照條件下的感知。
汽車自動駕駛的智能芯片及系統(tǒng)介紹
汽車自動駕駛的智能芯片及系統(tǒng)是實現自動駕駛功能的核心組成部分,。它們負責處理來自各種傳感器(如激光雷達、毫米波雷達,、攝像頭等)的大量數據,,執(zhí)行復雜的算法,以及控制車輛的各個系統(tǒng)(如制動,、轉向,、加速等)。以下是一些關于汽車自動駕駛智能芯片及系統(tǒng)的介紹:
自動駕駛芯片:自動駕駛芯片是自動駕駛系統(tǒng)的核心,,負責處理來自傳感器的數據,,執(zhí)行感知、決策和控制算法,。常見的自動駕駛芯片廠商包括英偉達(NVIDIA),、高通(Qualcomm)、英特爾(Intel)和Mobileye等,。例如,,英偉達的Drive PX系列芯片和Mobileye的EyeQ系列芯片都是專門為自動駕駛汽車設計的。
自動駕駛系統(tǒng):自動駕駛系統(tǒng)包括硬件和軟件兩部分,。硬件部分包括傳感器(如激光雷達,、毫米波雷達和攝像頭)、計算平臺(如自動駕駛芯片)和執(zhí)行器(如制動器,、轉向器和油門)等,。軟件部分包括感知算法(如物體檢測、道路識別和行人檢測),、決策算法(如路徑規(guī)劃和速度控制)和控制算法(如車輛穩(wěn)定控制和車道保持控制)等,。
自動駕駛系統(tǒng)架構:自動駕駛系統(tǒng)架構通常分為三個層次:感知層、決策層和執(zhí)行層,。感知層負責收集周圍環(huán)境的信息,,如物體位置、速度和類型等,;決策層負責根據感知層的信息制定行駛策略,,如路徑規(guī)劃、速度控制和避障策略等,;執(zhí)行層負責根據決策層的指令控制車輛的各個系統(tǒng),,如制動、轉向和加速等。
自動駕駛軟件平臺:自動駕駛軟件平臺是一個用于開發(fā)和部署自動駕駛算法的軟件框架,。它通常包括操作系統(tǒng),、中間件和應用層等部分。常見的自動駕駛軟件平臺有英偉達的DriveWorks,、高通的Snapdragon Ride和Mobileye的Road Experience Management(REM)等,。
總之,汽車自動駕駛的智能芯片及系統(tǒng)是實現自動駕駛功能的關鍵,。它們需要處理大量的數據,,執(zhí)行復雜的算法,并控制車輛的各個系統(tǒng)以確保安全,、穩(wěn)定和高效的自動駕駛,。